Joint Information
이 설정은 조인트를 선택할 때 표시됩니다.
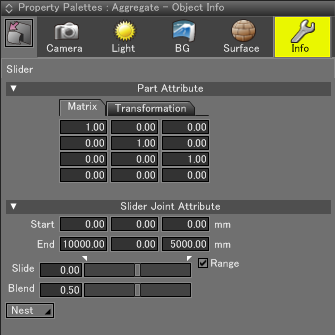
Part Attribute Settings
Matrix Tab
이 탭에는 변환 행렬이 표시됩니다.

텍스트 상자 중 하나에 새 값을 입력하면 변환이 변경됩니다. 각 값은 목표 좌표계에서 볼 수 있습니다. 때로는 "지역 좌표계에서 볼 때"라고 말합니다.
초기 변환 행렬을 단위 행렬이라고도합니다. 관절의 경우 값이 다른 의미를 가질 수 있습니다.
- Scale
- 위의 그림에서 "a", "e"및 "i"는 각각 X, Y 및 Z 좌표 축 방향의 배율을 나타냅니다.
- Shear
- 상기 도면에서, "b", "c", "d", "f", "g"및 "h"는 전 단비를 나타낸다.
- XY 평면에서 "b"및 "d"는 Y 및 X 축 방향의 "a"에 대한 전단 비율을 나타냅니다.
- YZ 평면에서 "f"및 "h"는 Z 및 Y 축 방향의 "e"에 대한 전단 비율을 나타냅니다.
- XZ 평면에서 "c"및 "g"는 Z 및 X 축 방향에서 "i"에 대한 전단 비율을 나타냅니다.
- Rotate
- X, Y 및 Z 좌표 축에 각각 (1, 0, 0), (0, 1, 0) 및 (0, 0, 1) 점이 있으면 회전 결과로 이동합니다. (a, b, c), (d, e, f) 및 (g, h, i).
- X 축 방향으로 θ 회전 한 결과 (1, 0, 0), (0, 1, 0) 및 (0, 0, 1) 지점은 다음과 같이 이동합니다.
(1, 0, 0) → (1, 0, 0)
(0, 1, 0) → (0, cos θ, sin θ)
(0, 0, 1) → (0, -sin θ, cos θ) - Y 축 방향으로 θ 회전 한 결과 (1, 0, 0), (0, 1, 0) 및 (0, 0, 1) 지점은 다음과 같이 이동합니다.:
(1, 0, 0) → (cos θ, 0, -sin θ)
(0, 1, 0) → (0, 1, 0)
(0, 0, 1) → (sin θ, 0, cos θ) - Z 축 방향으로 θ 회전 한 결과 (1, 0, 0), (0, 1, 0) 및 (0, 0, 1) 지점은 다음과 같이 이동합니다.
(1, 0, 0) → (cos θ, sin θ, 0)
(0, 1, 0) → (-sin θ, cos θ, 0)
(0, 0, 1) → (0, 0, 1)
- X 축 방향으로 θ 회전 한 결과 (1, 0, 0), (0, 1, 0) 및 (0, 0, 1) 지점은 다음과 같이 이동합니다.
- Translate
- 위의 그림에서 "tx", "ty"및 "tz"는 각각 X, Y 및 Z 좌표 축을 따라 이동 거리를 나타냅니다. 단위는 mm입니다.
Transformation Tab
이 탭에는 변환 할 텍스트 상자가 표시됩니다.
![]()
변환을 사용하려면 새 값을 입력하십시오. 파트의 경우 모든 하위 오브젝트에 변환이 적용됩니다.
이러한 방식으로 변환 된 하위 오브젝트는 파트에서 제거 된 경우 원래 형식으로 복원되지 않습니다.
Joint Attribute Settings
관절 속성 설정은 선택한 관절 유형에 따라 다릅니다.