「智能運動」編輯器的設定
智能運動編輯器是一種輔助逆運動學(IK)操作的功能,可以輕鬆設置具有複雜關節結構的形狀姿勢和運動。當您想要逼真地再現人物和動物等角色,與多連接相聯動的機器等複雜運動時,它能發揮效果。
注意 智能運動編輯器只搭載在於Professional和Standard版本中。
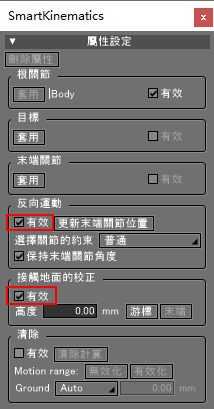
●屬性設定
要使用智能運動,必須為作為IK運動的關節設置適當的屬性。
◆在關節上設置屬性
- 從Shade3D檔瀏覽器的「Shade3D Ver.19」的「Documentation」中的「Plugin」中打開「smartkinematics01_setup.shd」。(需額外安裝)
- 此外,如果未顯示瀏覽器,請從「顯示」選單中選擇「瀏覽器」以顯示瀏覽器。
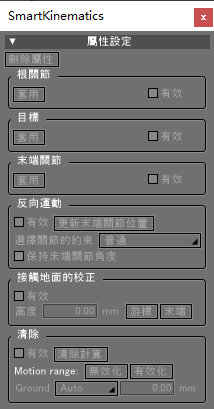
- 從「顯示」選單中選擇「智能運動」編輯器。
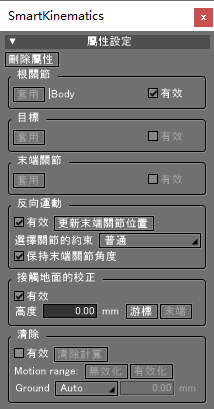
將顯示「智能運動」編輯器視窗。
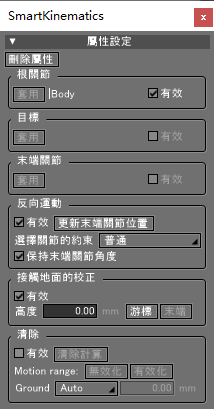
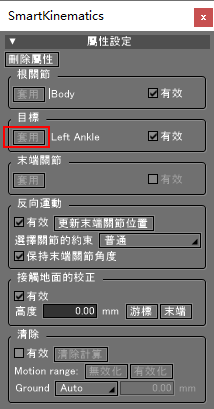
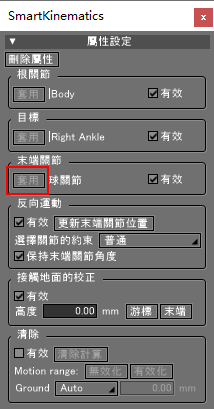
- 選擇「| Body」關節,然後按一下「智能運動編輯器」視窗的「根關節」組中的套用按鈕。
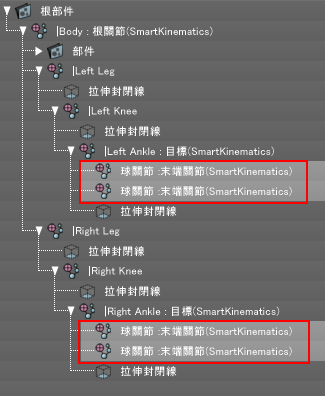
在「| Body」關節中設置了根關節屬性,「| Body:根關節(smart kinematics)」在瀏覽器中顯示。

- 同時選擇「|Left Ankle」和「|Right Ankle」關節,然後按一下「智能運動」編輯器視窗的「目標」組中的「套用」按鈕。
目標屬性設置為「|Left Ankle」和「|Right Ankle」關節,瀏覽器顯示「|Left Ankle:目標(smart kinematics)」「|Right Ankle:目標(smart kinematics)」。

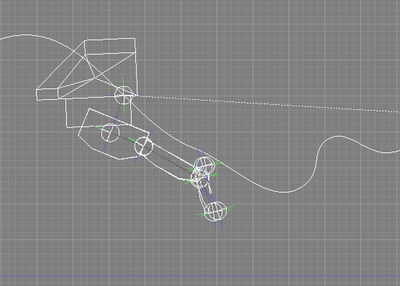
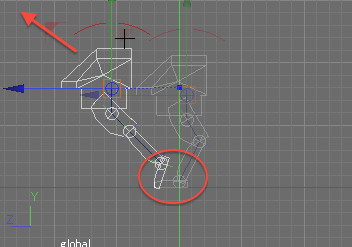
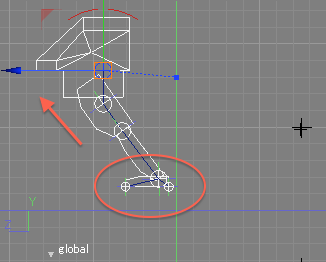
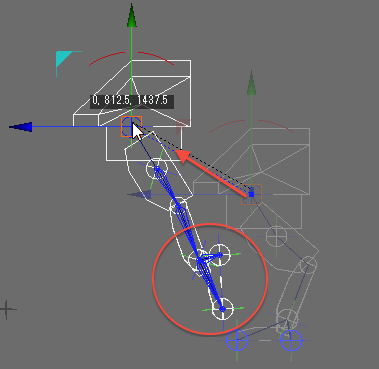
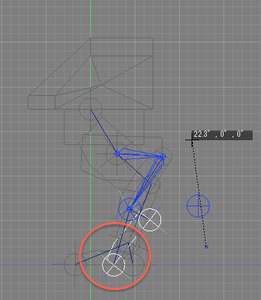
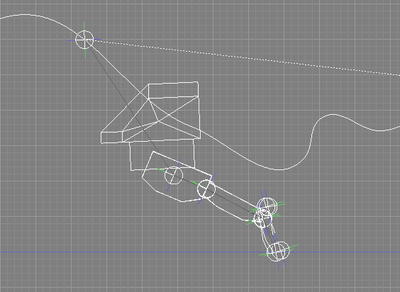
- 選擇| Body:根關節(智能運動)關節後,將編輯模式切換為「關節」(從控制欄上的編輯模式彈出選單中選擇「關節」),拖動操縱器.

約束發生在「|Left Ankle」和「|Right Ankle」關節的位置處,並且腳踝總朝原始位置(發生約束的位置)的方向移動。
- 從「編輯」選單中選擇「取消」以取消操作。
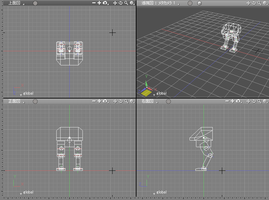
- 從工具箱的「部件」選項卡中選擇「球關節」,並在雙足機器人腳跟和腳尖的位置處創建一個球形接頭。
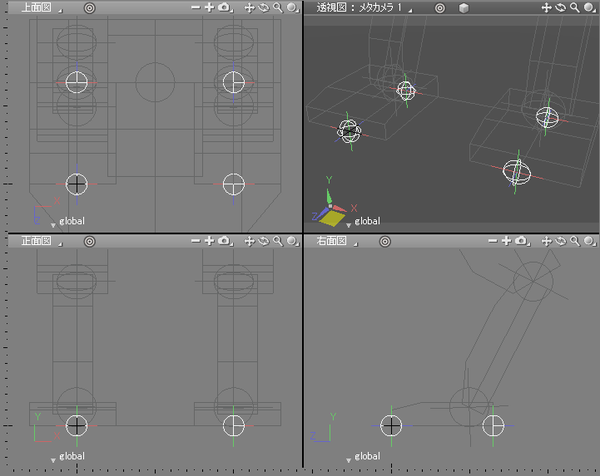
- 在瀏覽器中,將您創建的球關節放在以下位置。
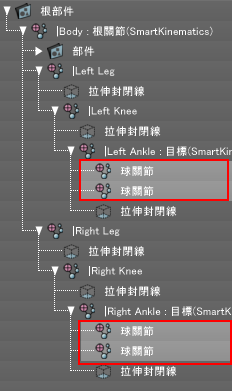
- 將「|Left Ankle:目標(smart kinematics)」和「|Right Ankle:目標(smart
kinematics)」中包含的所有「球關節」選中,按一下「智能運動」編輯器視窗「末端關節」組中的「套用」按鈕。
末端關節屬性設置為「球關節」,並且「球關節:末端關節(Smart Kinematics)」顯示在瀏覽器中。
- 選擇| Body:根關節(smart kinematics)關節後,將編輯模式切換為「關節」並拖動和移動操縱器。
「|Left leg:目標(smart kinematics)」和「|Right leg:目標(smart kinematics)」的關節被固定,保持腳趾和腳跟之間的位置不變的前提下移動。
- 從「編輯」選單中選擇「取消」以取消操作。
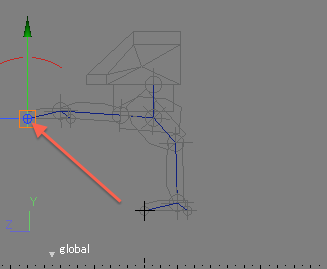
- 選擇包含在「|Left leg:目標(smart kinematics)」中,選中之間一側的「球關節:末端關節(Smart
Kinematics)」的狀態下,將編輯模式切換為「關節」並拖動和移動操縱器。
整個物體像被腳趾的球關節的運動拉動一樣移動。
在以下說明中,具有路線,目標和結束屬性集的關節被稱為根關節,目標骨骼和末端關節。
◆刪除屬性
在以下說明中,具有路線,目標和結束屬性集的關節被稱為根關節,目標和末端關節。
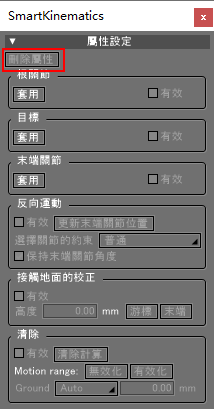
此外,如果要為已具有屬性集的骨骼設置不同的屬性,則需要刪除已設定屬性,然後設置新屬性。
●反向運動的詳細設置
配合操作IK時的動作狀況,設置智能運動。
◆控制關節約束
IK操作完成後,您可以選擇控制目標關節約束的方法。
移動整個IK鏈偏移時,此功能不會影響操作。 下面,將檢查控制關節約束的每種方法的動作差異。
- 從Shade3D檔瀏覽器的「Shade3D Ver.19」的「Documentation」中的「Plugin」中打開「smartkinematics02_snap.shd」。
- 從「顯示」選單中選擇「智能運動」以顯示「智能運動」編輯器視窗。 此外,如果未顯示瀏覽器,請從「顯示」選單中選擇「瀏覽器」以顯示瀏覽器。
-
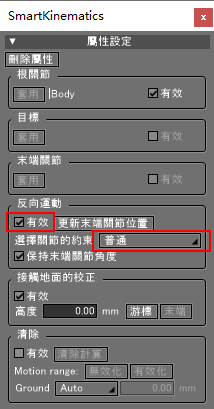
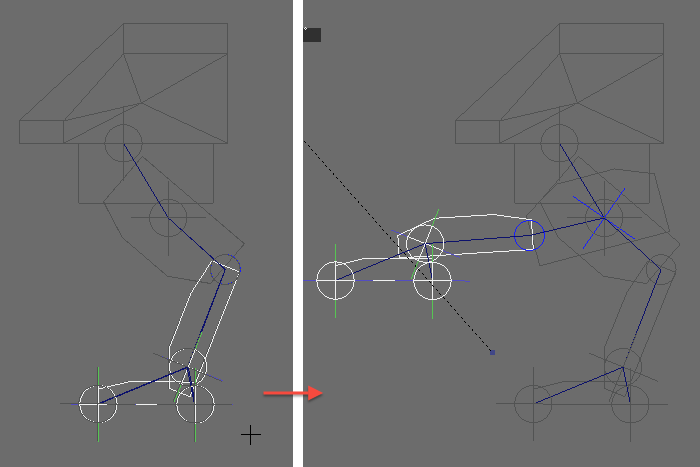
在瀏覽器中選擇「根關節」以外的任何內容時,選中「智能運動」編輯器視窗中「反向運動」組中的「有效」核取方塊,然後在「反向運動」組中「選擇關節的約束」的彈出選單中選擇「普通」。
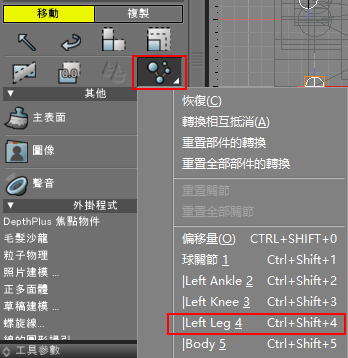
- 選中「Left knee」關節後,按一下工具箱「建立」選項卡上的「移動」按鈕,然後從「關節操作」工具的彈出選單中選擇「||Left
leg」以操作IK。
- 在腳踝處產生約束,腳趾和腳跟盡可能不可能移動的範圍內動膝蓋和大腿。
- 從「編輯」選單中選擇「取消」以取消操作。
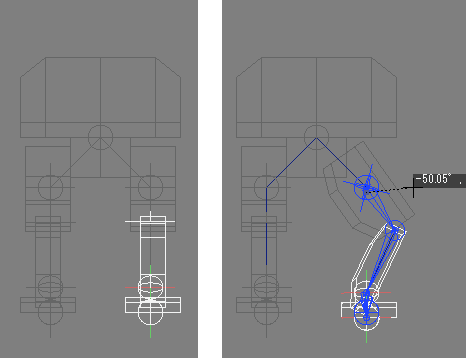
- 從「智能運動」編輯器視窗的「反向運動」組中的「選擇關節的約束」彈出選單中選擇「一半」。
- 選中「Left knee」關節後,按一下工具箱「建立」選項卡上的「移動」按鈕,從「關節操作」工具的彈出選單中選擇「|Left
leg」以操作IK。膝蓋和大腿自由移動,在腳踝下方,腳跟和腳尖在保持角度不變的情況下跟隨。
- 從「編輯」選單中選擇「取消」以取消操作。
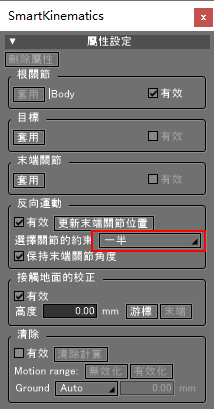
- 從「智能運動」編輯器視窗的「反向運動」組中的「選擇關節的約束」彈出選單中選擇「自由」。
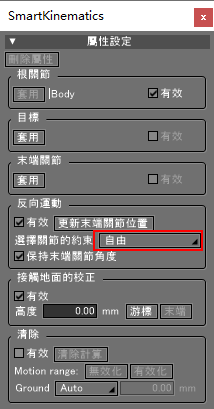
- 選中「Left Knee」關節的狀態下,點擊工具箱的「建立」選項卡的「移動」按鈕,從「關節操作」工具的彈出選單中選擇「|Left
leg」並操作IK。
膝蓋和大腿自由移動,腳踝及其下方保持固定狀態跟隨它動。
◆保持末端關節角度
當角色的腳在行走過程中離開地面,末端關節不能保持其原始位置時,例如,設置目標關節下方如何運動。
下面,我們將檢查保持末端角度和不保持時的行為差異。
- 從Shade3D檔瀏覽器的「Shade3D Ver.19」的「Documentation」中的「Plugin」中打開「smartkinematics02_snap.shd」。
- 從「顯示」選單中選擇「智能運動」以顯示「智能運動」編輯器視窗。
此外,如果未顯示瀏覽器,請從「顯示」選單中選擇「瀏覽器」以顯示瀏覽器。 - 如果在瀏覽器中選擇了「骨骼部件」以外的任何其他部件,請選中「智能運動」視窗中「反向運動」組中的「有效」核取方塊,並選中「保持末端關節角度」核取方塊。
- 如果在瀏覽器中選擇了「骨骼部件」以外的任何其他部件,請選中「智能運動」視窗中「反向運動」組中的「有效」核取方塊,並選中「保持末端關節角度」核取方塊。
重要 為了保持末端關節角度,需要兩個以上末端關節。
- 從「編輯」選單中選擇「取消」以取消操作。
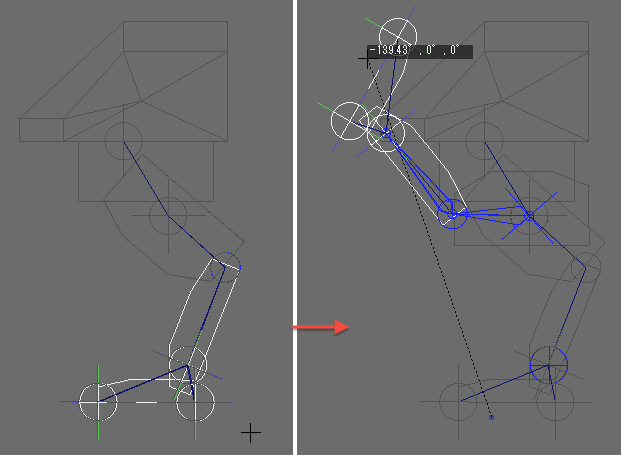
- 清除「智能運動」編輯器視窗的「反向運動」組中的「保持末端關節角度」核取方塊。
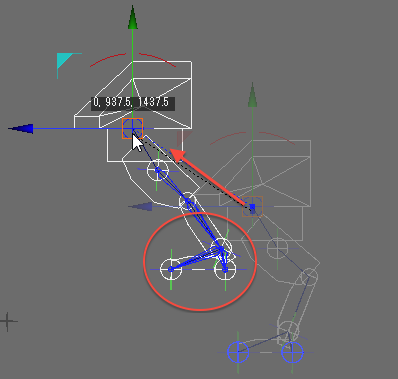
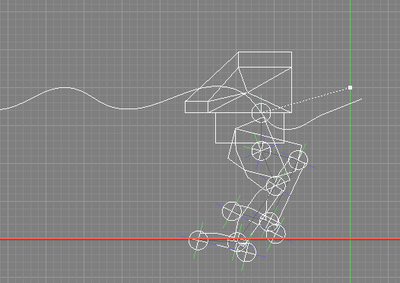
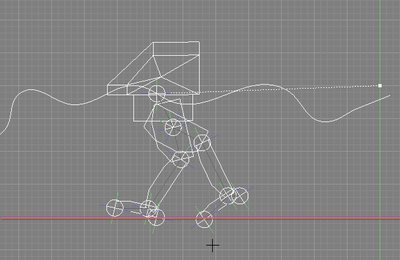
- 選擇|
Body:根關節(智能運動)關節後,將編輯模式切換為「關節」並拖動操縱器進行移動。當腳離開地面時,腳踝關節朝向腳尖和腳踝的原始位置進行移動。
●接觸地面的校正
接觸地面的校正可以在末端關節位置接近地面高度時自動調整IK使末端關節捕捉到接地平面,接地平面的高度可以任意改變。對於例如步行運動等需要精確接地時,這個功能很方便。
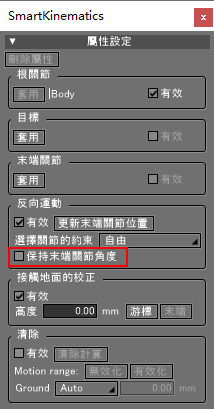
當「反向運動」組的「有效」核取方塊關閉或「有效」核取方塊打開並且在「選擇關節的約束」彈出選單中選擇「自由」時,接觸地面的校正變為有效。
- 打開Shade3D文件瀏覽器的「Shade3D Ver.19」的「Documentation」中的「Plugin」中打開「smartkinematics02_snap.shd」。
- 從「顯示」選單中選擇「智能運動」以顯示「智能運動」編輯器視窗。
此外,如果未顯示瀏覽器,請從「顯示」選單中選擇「瀏覽器」以顯示瀏覽器。 - 如果在瀏覽器中選擇了「根部件」以外的任何內容,請取消選中「智能運動」視窗中「反向運動」組中的「有效」核取方塊。
- 如果選中「| Body:跟關節(SmartKinematics)」關節或更低層次形狀後,確保「智能運動」視窗中「接觸地面的校正」組中的核取方塊是「有效」。
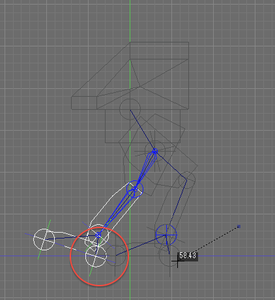
- 選擇「Left Knee」,按一下工具箱「建立」選項卡上的「移動」按鈕,從「關節操作」工具的彈出選單中選擇「Left
knee」,在拖動圖視窗內拖動移動。
當腳趾和腳跟的位置中的末端關節的位置接近距離接地平面的高度1/2網格時,捕捉到接地平面的高度。
- 從「編輯」選單中選擇「取消」以取消操作。
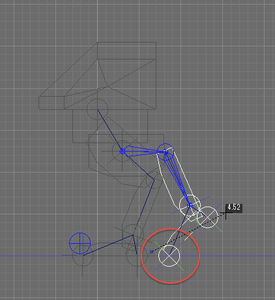
- 選中「Left ankle」的狀態下,按一下工具箱「生成」選項卡上的「移動」按鈕,從「關節操作」的工具彈出選單中選擇「Left
ankle」,在圖形視窗內拖動移動。 腳尖和腳跟處的關節只中,總是調節膝蓋和大腿的旋轉,使低位的那個關節與地面接觸。
●運動補充導致的位置偏移的修正
利用清除功能,對由於運動點之間的運動補充而導致的腳部位置在例如步行運動中產生滑動的現象進行修正。
對於清除功能,必須在設置運動後使用「清除計算」按鈕測量位置偏移。 此外,如果在執行清除後更改運動,則需要再次運行清除。
- 打開Shade3D文件瀏覽器的「Shade3D Ver.19」的「Documentation」中的「Plugin」中打開「smartkinematics03_cleanup.shd」。
- 從「顯示」選單中選擇「智能運動」以顯示「智能運動」編輯器視窗。 此外,如果未顯示瀏覽器,請從「顯示」選單中選擇「瀏覽器」以顯示瀏覽器。
- 選中| Body:根關節(SmartKinematics)關節時,請確保未選中智能運動編輯器視窗中清除計算組中的有效核取方塊。
智能運動編輯器 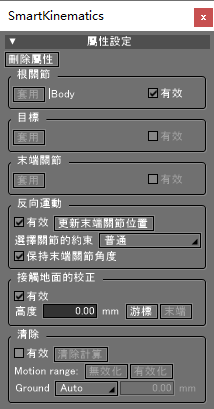
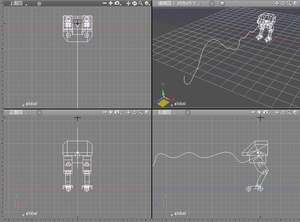
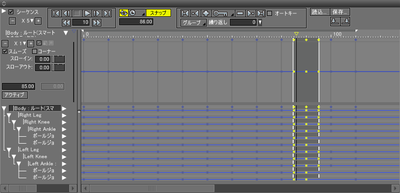
- 從「顯示」選單中選擇「運動」以顯示「運動」視窗。
- 按一下「運動」視窗中的「播放」按鈕
 以預覽運動。
您可以看到腳的位置在運動點之間滑動並且不時下沉到地面下。
以預覽運動。
您可以看到腳的位置在運動點之間滑動並且不時下沉到地面下。
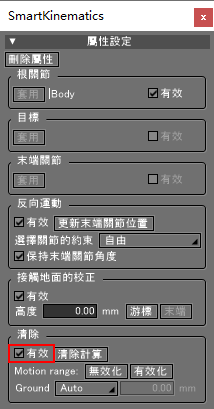
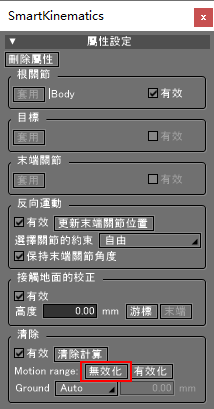
- 選中「智能運動」編輯器視窗中「清除」組中的「有效」核取方塊。
- 在「運動」視窗中,選擇所有運動點。
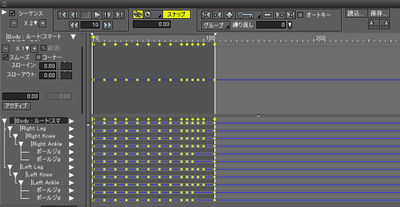
- 按一下「智能運動」編輯器視窗的「清除」組中的「清除計算」按鈕。
- 按一下「動畫」編輯器視窗中的「播放」按鈕以預覽運動。 腳的位置受到限制,不再滑動。
但是,可以確認跳躍運動出錯了。
- 在「運動」視窗中,選擇跳躍運動開始的第10到第12(85到95幀)運動點。
- 按一下「智能運動」編輯器視窗的「清除」組中的「無效化」按鈕。
- 按一下「動畫」編輯器視窗中的「播放」按鈕以預覽運動。 確認在設定清除無效的範圍內消除了關節的約束,並且操作整體上變得正常。