智能动画编辑器的设置
智能动画编辑器是一种辅助逆运动学(IK)操作的功能,可以轻松设置具有复杂关节结构的形状姿势和运动。当您想要逼真地再现人物和动物等角色,与多连接相联动的机器等复杂运动时,它能发挥效果。
注意 智能动画编辑器只搭载在于Professional和Standard版本中。
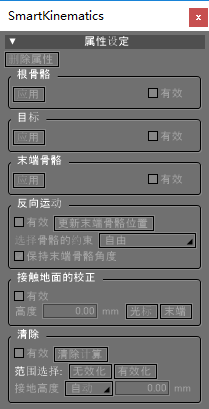
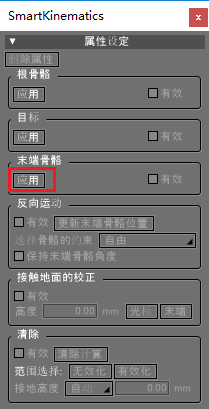
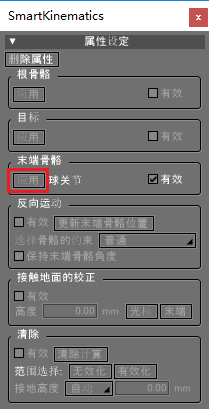
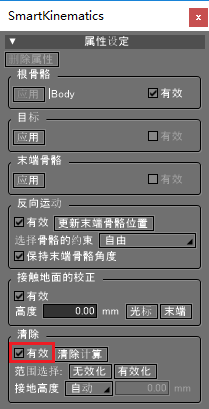
●属性设定
要使用智能动画,必须为作为IK运动的关节设置适当的属性。
◆在关节上设置属性
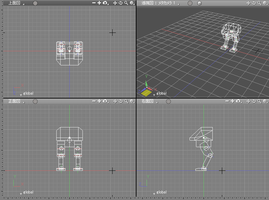
- 从Shade3D的ShadeExplorer的「文档—样书」中打开「smartkinematics01_setup.shd」。(需另行加载)
- 此外,如果未显示浏览器,请从「显示」菜单中选择「浏览器」以显示浏览器。
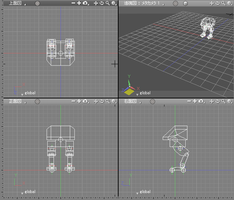
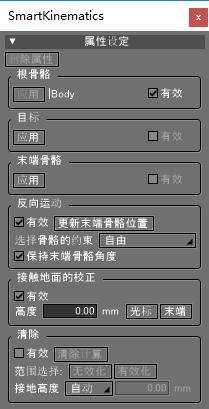
- 从「显示」菜单中选择「智能动画编辑器」。
将显示「智能动画编辑器」窗口。
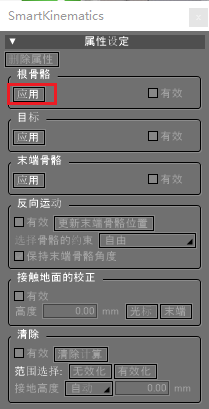
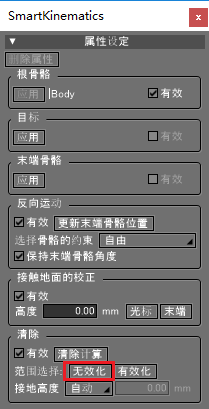
- 选择「|Body」关节,然后单击「智能动画编辑器」窗口的「根节点」组中的应用按钮。
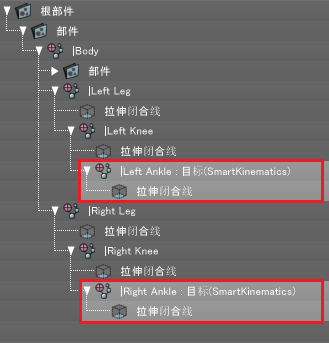
在「|Body」关节中设置了根节点属性,「|Body:根骨骼(SmartKinematics)」在浏览器中显示。

- 同时选择「|Left leg」和「|Right leg」关节,然后单击「智能动画编辑器」窗口的「目标节点」组中的「应用」按钮。
目标属性设置为「|Left leg」和「|Right leg」关节,浏览器显示「|Left leg:目标(SmartKinematics)」「|Right leg:目标(SmartKinematics)」。
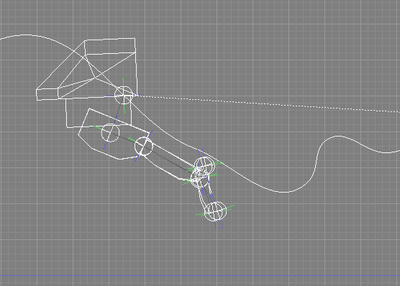
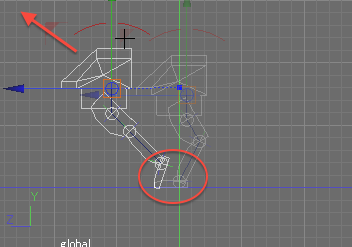
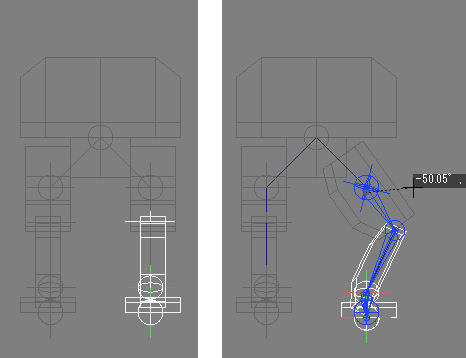
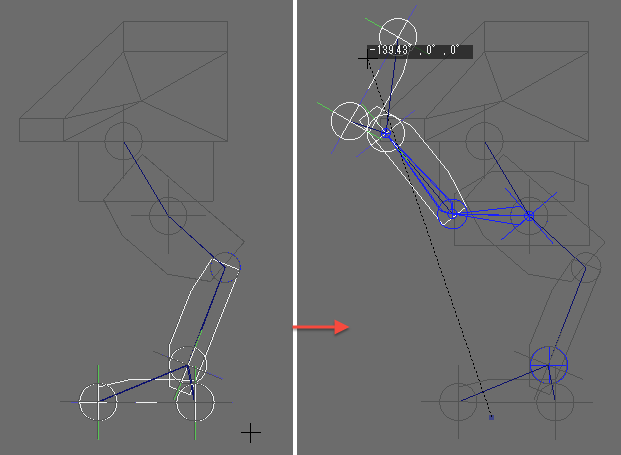
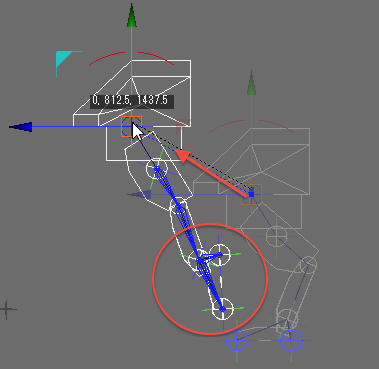
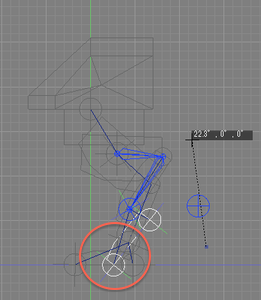
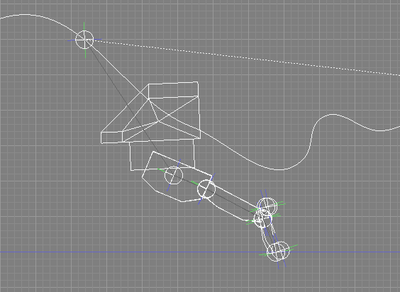
- 选择|Body:根骨骼(SmartKinematics)关节后,将编辑模式切换为「关节」(从控制栏上的编辑模式弹出菜单中选择「关节」),拖动操纵器.

约束发生在「|Left leg」和「|Right leg」关节的位置处,并且脚踝总朝原始位置(发生约束的位置)的方向移动。
- 从「编辑」菜单中选择「取消」以取消操作。
- 从工具箱的「部件」选项卡中选择「球关节」,并在双足机器人脚跟和脚尖的位置处创建一个球关节。
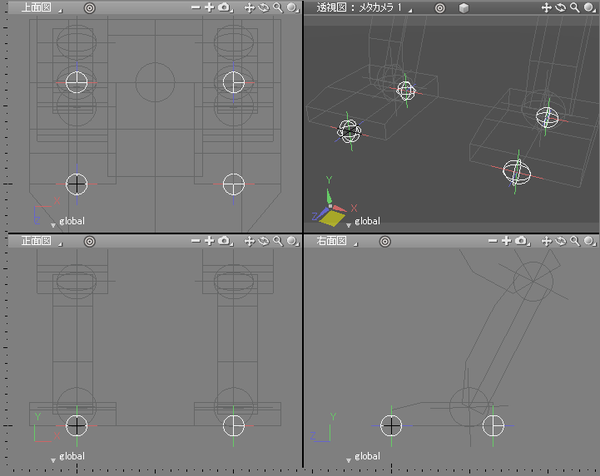
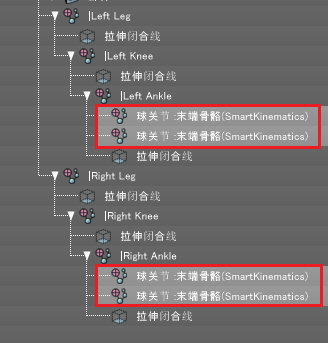
- 在浏览器中,将您创建的球关节放在以下位置。

- 将「|Left leg:目标(SmartKinematics)」和「|Right leg:目标(SmartKinematics)」中包含的所有「球关节」选中,单击「智能动画编辑器」窗口「结束节点」组中的「应用」按钮。
末端骨骼属性设置为「球关节」,并且「球关节:结束节点(SmartKinematics)」显示在浏览器中。
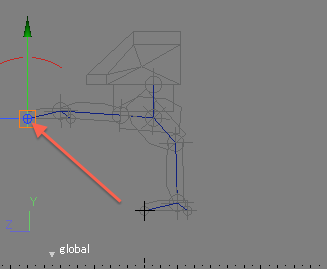
- 选择| Body:根骨骼(smart kinematics)关节后,将编辑模式切换为「关节」并拖动和移动操纵器。
「|Left leg:目标(smart kinematics)」和「|Right leg:目标(smart kinematics)」的关节被固定,保持脚趾和脚跟之间的位置不变的前提下移动。
- 从「编辑」菜单中选择「取消」以取消操作。
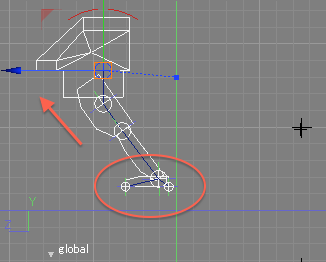
- 选择包含在「|Left leg:目标(smart kinematics)」中,选中之间一侧的「球关节:末端骨骼(Smart
Kinematics)」的状态下,将编辑模式切换为「关节」并拖动和移动操纵器。
整个物体像被脚趾的球关节的运动拉动一样移动。
在以下说明中,具有路线,目标和结束属性集的关节被称为根骨骼,目标骨骼和末端骨骼。
◆删除属性
在以下说明中,具有路线,目标和结束属性集的关节被称为根骨骼,目标骨骼和末端骨骼。
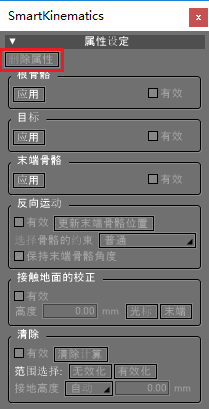
此外,如果要为已具有属性集的骨骼设置不同的属性,则需要删除已设定属性,然后设置新属性。
●反向运动的详细设置
配合操作IK时的动作状况,设置智能动画。
◆控制关节约束
IK操作完成后,您可以选择控制目标关节约束的方法。
移动整个IK链偏移时,此功能不会影响操作。 下面,将检查控制关节约束的每种方法的动作差异。
- 从Shade3D文件浏览器的「Shade3D Ver.19」的「Documentation」中的「Plugin」中打开「smartkinematics02_snap.shd」。
- 从「显示」菜单中选择「SmartKinematics」以显示「智能动画编辑器」窗口。 此外,如果未显示浏览器,请从「显示」菜单中选择「浏览器」以显示浏览器。
-
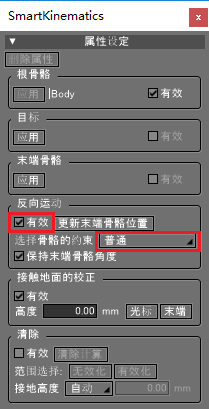
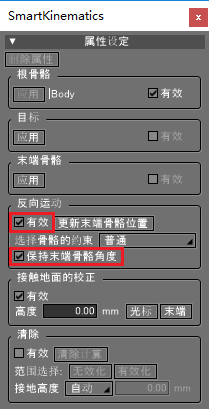
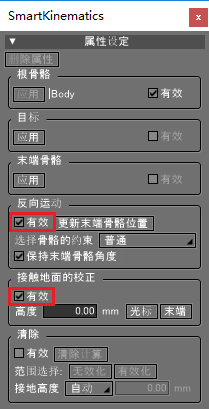
在浏览器中选择「根骨骼」以外的任何内容时,选中「智能动画编辑器」窗口中「反向运动」组中的「有效」复选框,然后在「反向运动」组中「选择骨骼的约束」的弹出菜单
从中选择「普通」。
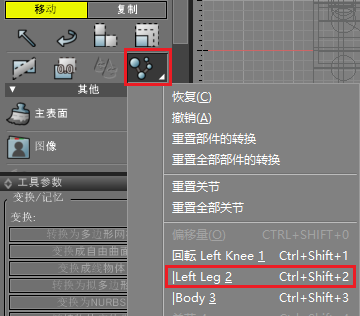
- 选中「Left knee」关节后,单击工具箱「生成」选项卡上的「移动」按钮,然后从「关节操作」工具的弹出菜单中选择「||Left
leg」以操作IK
- 在脚踝处产生束缚,脚趾和脚跟尽可能不可能移动的范围内动膝盖和大腿。
- 从「编辑」菜单中选择「取消」以取消操作。
- 从「智能动画编辑」窗口的「反向运动」组中的「选择骨骼的约束」弹出菜单中选择「一半」。
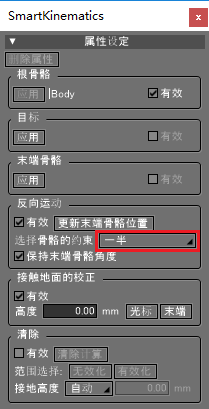
- 选中「Left knee」关节后,单击工具箱「创建」选项卡上的「移动」按钮,从「关节操作」工具的弹出菜单中选择「|Left
leg」以操作IK。膝盖和大腿自由移动,在脚踝下方,脚跟和脚尖在保持角度不变的情况下跟随。
- 从「编辑」菜单中选择「取消」以取消操作。
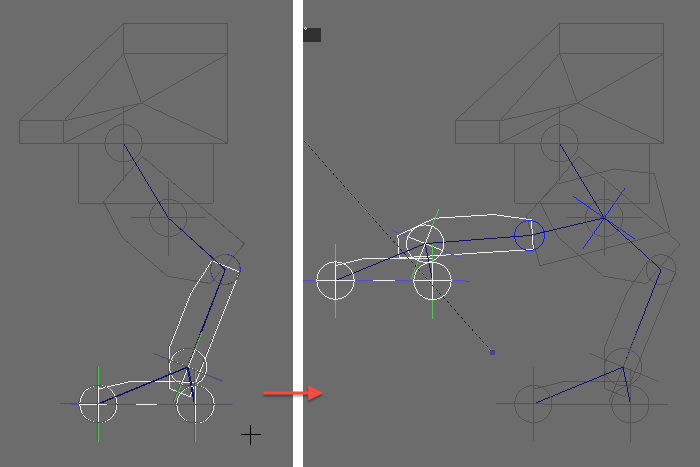
- 从「智能动画」窗口的「反向运动学」组中的「选择骨骼的约束」弹出菜单中选择「自由」。
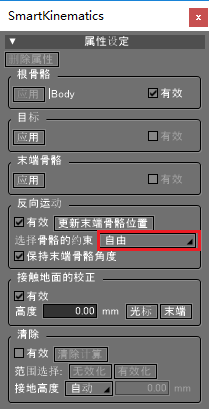
- 选中「Left Knee」关节的状态下,点击工具箱的「生成」选项卡的「移動」按钮,从「关节操作」工具的弹出菜单中选择「|左腿」并操作IK。
膝盖和大腿自由移动,脚踝及其下方保持固定状态跟随它动。
◆保持末端角度
当角色的脚在行走过程中离开地面,末端关节不能保持其原始位置时,例如,设置目标关节下方如何运动。
下面,我们将检查保持末端角度和不保持时的行为差异。
- 从Shade3D文件浏览器的「Shade3D Ver.19」的「Documentation」中的「Plugin」中打开「smartkinematics02_snap.shd」。
- 从「显示」菜单中选择「SmartKinematics」以显示「智能动画编辑器」窗口。
此外,如果未显示浏览器,请从「显示」菜单中选择「浏览器」以显示浏览器。 - 如果在浏览器中选择了「骨骼部件」以外的任何其他部件,请选中「智能动画」窗口中「反向运动」组中的「有效」复选框,并选中「保持末端骨骼」复选框。
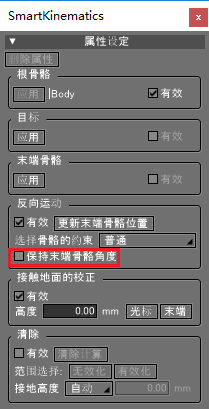
- 如果在浏览器中选择了「骨骼部件」以外的任何其他部件,请选中「智能动画」窗口中「反向运动」组中的「有效」复选框,并选中「保持末端骨骼角度」复选框。
重要 为了保持末端角,需要两个以上末端接头。
- 从「编辑」菜单中选择「取消」以取消操作。
- 清除「Smart Kinematics」窗口的「Inverse Kinematics」组中的「保持末端骨骼角度」复选框。
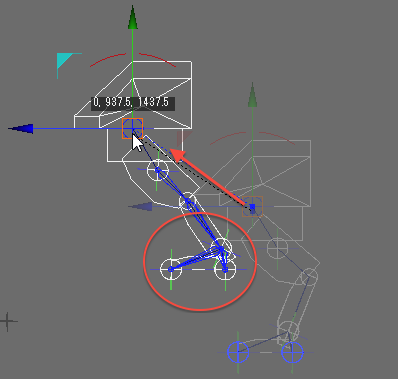
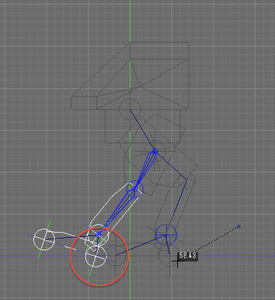
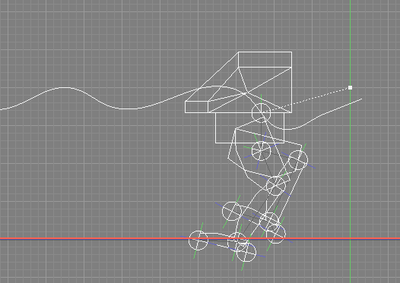
- 选择|
Body:根骨骼(智能动画)关节后,将编辑模式切换为「关节」并拖动操纵器进行移动。当脚离开地面时,脚踝关节朝向脚尖和脚踝的原始位置进行移动。
●捕捉地面的校正
捕捉地面的校正可以在末端关节位置接近地面高度时自动调整IK使末端骨骼捕捉到接地平面,接地平面的高度可以任意改变。 对于例如步行运动等需要精确接地时,这个功能很方便。
当「反向运动」组的「有效」复选框关闭或「有效」复选框打开并且在「选择性骨骼约束」弹出菜单中选择「自由」时,捕捉地平面的校正变为有效。
- 打开Shade3D文件浏览器的「Shade3D Ver.19」的「Documentation」中的「Plugin」中打开「smartkinematics02_snap.shd」。
- 从「显示」菜单中选择「SmartKinematics」以显示「智能动画编辑器」窗口。
此外,如果未显示浏览器,请从「显示」菜单中选择「浏览器」以显示浏览器。 - 如果在浏览器中选择了「根部件」以外的任何内容,请取消选中「智能动画」窗口中「反向运动学」组中的「有效」复选框。
- 如果选中「| Body:Smart(运动学)」关节或更低层次形状后,确保「智能动画」窗口中「捕捉地平面的校正」组中的复选框是「有效」 。
- 选择「Left Knee」,单击工具箱「生成」选项卡上的「移动」按钮,从「关节操作」工具的弹出菜单中选择「Left
knee」,在拖动图窗口内拖动移动。
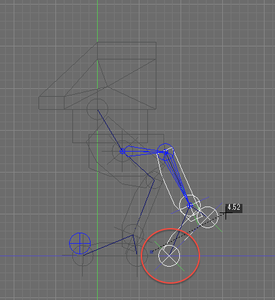
当脚趾和脚跟的位置中的末端接头的位置接近距离接地平面的高度1/2网格时,捕捉到接地平面的高度。
- 从「编辑」菜单中选择「取消」以取消操作。
- 选中「Left ankle」的状态下,单击工具箱「生成」选项卡上的「移动」按钮,从「关节操作」的工具弹出菜单中选择「Left
ankle」,在图形窗口内拖动移动。 脚尖和脚跟处的关节只中,总是调节膝盖和大腿的旋转,使低位的那个关节与地面接触。
●运动补充导致的位置偏移的修正
利用清除功能,对由于运动点之间的运动补充而导致的脚部位置在例如步行运动中产生滑动的现象进行修正。
对于清除功能,必须在设置运动后使用「清除执行」按钮测量位置偏移。 此外,如果在执行清除后更改运动,则需要再次运行清除。
- 打开Shade3D文件浏览器的「Shade3D Ver.19」的「Documentation」中的「Plugin」中打开「smartkinematics03_cleanup.shd」。
- 从「显示」菜单中选择「SmartKinematics」以显示「智能动画编辑器」窗口。 此外,如果未显示浏览器,请从「显示」菜单中选择「浏览器」以显示浏览器。
- 选中| Body:根骨骼(Smart Kinematics)关节时,请确保未选中智能动画编辑器窗口中清除计算组中的有效复选框。
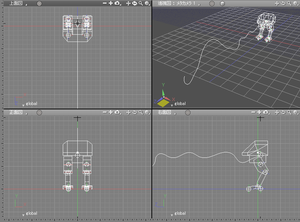
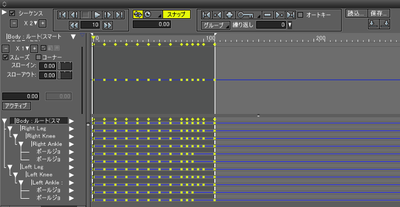
- 从「显示」菜单中选择「运动」以显示「运动」窗口。
- 单击「运动」窗口中的「播放」按钮
 以预览运动。
您可以看到脚的位置在运动点之间滑动并且不时下沉到地面下。
以预览运动。
您可以看到脚的位置在运动点之间滑动并且不时下沉到地面下。
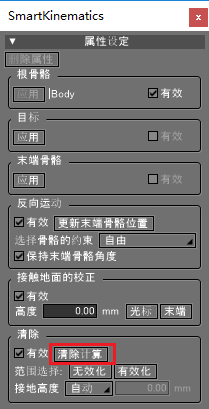
- 选中「智能动画编辑器」窗口中「清除」组中的「有效」复选框。
- 在「运动」窗口中,选择所有运动点。
- 单击「智能动画编辑器」窗口的「清除」组中的「清除计算」按钮。
- 单击「动画编辑器」窗口中的「播放」按钮以预览运动。 脚的位置受到限制,不再滑动。
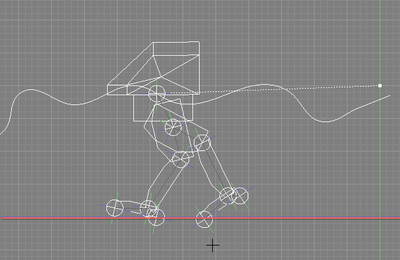
但是,可以确认跳跃运动出错了。
- 在「运动」窗口中,选择跳跃运动开始的第10到第12(85到95帧)运动点。

- 单击「智能动画编辑器」窗口的「清除」组中的「无效化」按钮。
- 单击「动画编辑器」窗口中的「播放」按钮以预览运动。 确认在设定清除无效的范围内消除了关节的约束,并且操作整体上变得正常。