目标约束
目标约束是一种可以在物体和任意目标之间创建互锁结构,并且可以创建始终追踪目标所在方向的物体的功能。应用目标约束可以轻松设置具有复杂关节结构的物体的姿势和动作。此外,通过将目标设置到照相机,可以创建始终正面朝向照相机的形状。这样一来,可以防止平面上树之类的纹理映射的物体因照相机的角度变换而看不见。
注意 目标约束只在Professional和Standard中搭载。
●设置物体作为目标
创建一个针以物体为对象的关联结构并确认其动作。
◆设定联动
- 从「ShadeExplorer」中的「文档―样书」打开「aimconstraints.shd」。(示例文件要另外加载)
- 从「显示」菜单中选择「浏览器」以显示浏览器。
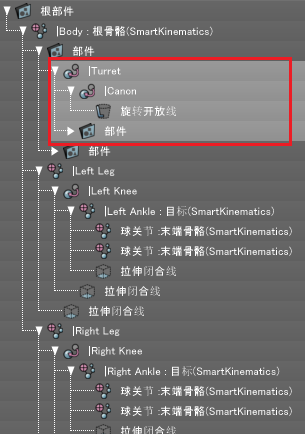
- 选择「|Turret」关节。
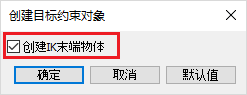
- 从「工具」菜单栏中选择「部件」的「目标对象」(或从「工具箱」「部件」选项卡的插件部分选择「目标对象」)。将显示「创建目标约束对象」对话框。
- 确认「创建目标约束对象」对话框中的「创建IK末端物体」复选框为关闭状态,然后单击「确定」按钮。
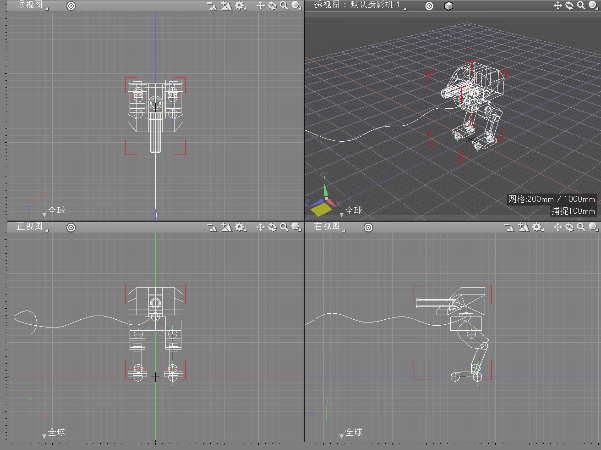
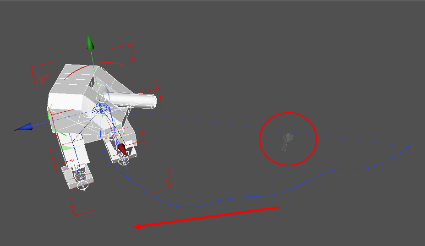
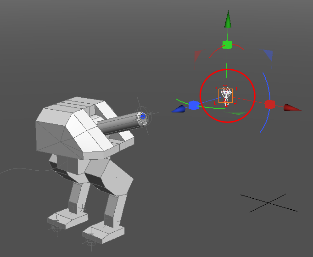
- 将三维光标的位置与炮筒前端对齐,然后单击或拖动。 拖动的方向和距离不会影响运动。
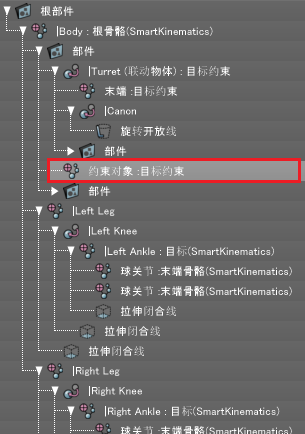
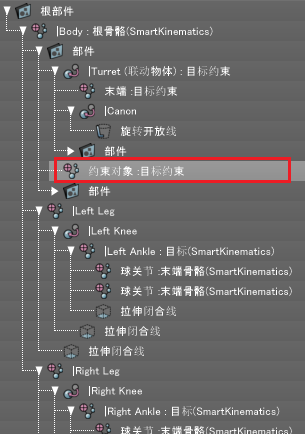
在「|Turret」关节上设置联动,并且「|Turret(联动物体):目标约束」显示在浏览器中。
「|Turret(联动物体):目标约束」关节下创建球关节,并在浏览器中显示为「约束对象:目标约束」。
- 选择「约束对象:目标约束」。
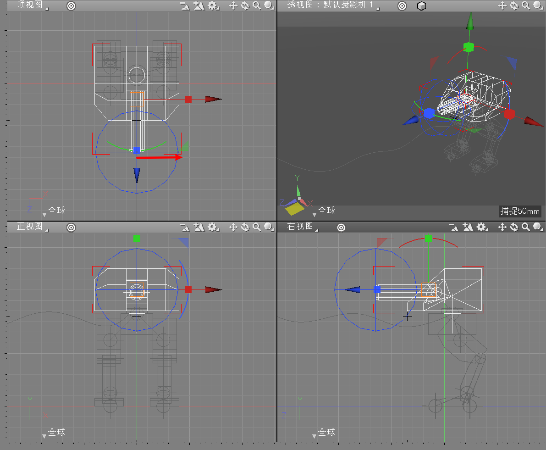
- 将编辑模式切换为「关节」并拖动操纵器以移动「约束对象:目标约束」。
可以确认炮塔跟随对象移动而移动。
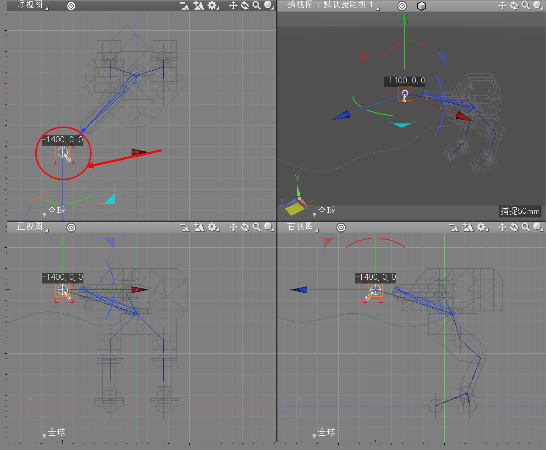
「|Turret(联动物体):目标约束」关节是Y轴旋转的旋转关节,因此它与俯视图中的操作相关联。 - 使用「编辑」 - 「取消」返回初始位置后,将「约束对象:目标约束」移出「|body:根骨骼(SmartKinematics)」关节外。
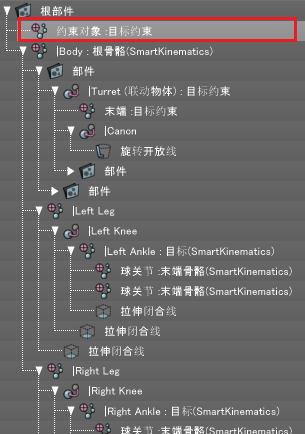
- 选择|body :根骨骼(SmartKinematics)关节。
-
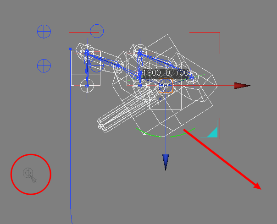
将编辑模式切换为「关节」,使用俯视图拖动操纵器并移动「|body:根骨骼(SmartKinematics)」关节。
即使物体移动,也可以看到炮塔始终面向目标。
「|Turret(物体联动):目标约束」关节是绕Y轴旋转的旋转关节,因此它与俯视图中的操作相关联。 - 从「显示」菜单中选择「动画编辑器」以显示「动画编辑器」窗口。
- 单击「动画编辑器」窗口中的「播放」按钮以预览动画。
可以看到炮塔与步行同步面向目标。
◆解除联动
通过删除目标的球节,可以取消物体和对象的关联。
- 从目前为止的操作场景中选择「约束对象:目标约束」。
- 从「编辑」菜单中选择「删除」以删除球节。
- 取消物体和对象的关联,浏览器显示变回「|Turret」。
◆设置与层次结构的联动
- 从「ShadeExplorer」中的「文档―样书」打开「aimconstraints.shd」。(示例文件要另外加载)
- 从「显示」菜单中选择「浏览器」以显示浏览器。
- 选择「|Turret」关节。
- 从工具框的「部件」选项卡中选择「对象约束目标」。将显示「对象约束目标」对话框。
- 从「工具」菜单栏中选择「部件」的「目标对象」(或从「工具箱」「部件」选项卡的插件部分选择「目标对象」)。将显示「创建目标约束对象」对话框。
- 将三维光标的位置与炮筒尖端对齐,然后单击或拖动。此外, 拖动的方向和距离不会影响运动。
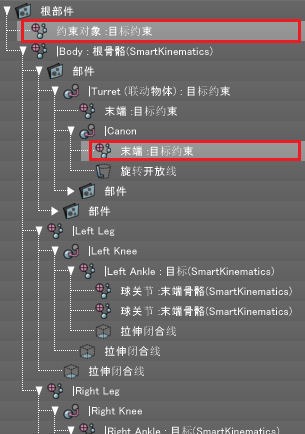
设置为关联「|Turret」关节,在浏览器中显示「|Turret(联动物体):目标约束」。
在「|Turret(联动物体):目标约束」关节中创建球关节,在浏览器中显示「末端:目标约束」。
在「|Turret(联动物体):目标约束」关节下创建球关节,并在浏览器中显示「约束对象:目标约束」。
- 将「末端:目标约束」移动到「|Cannon」关节中。
将「约束对象:目标约束」移到「|body:根骨骼(SmartKinematics)」关节外。
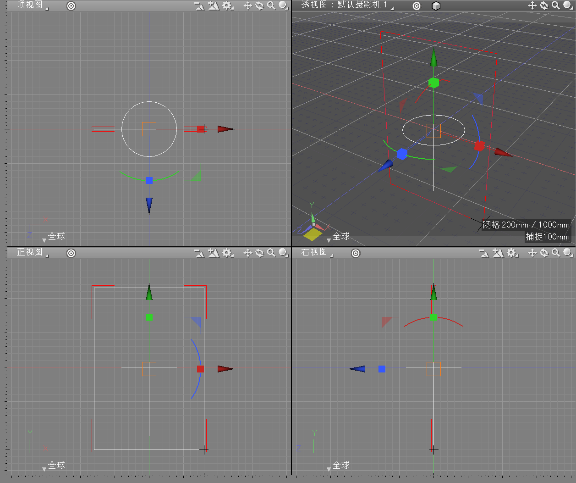
- 确保选中「约束对象:目标约束」。将编辑模式切换为「关节」并拖动操纵器上下左右移动「约束对象:目标约束」。你可以看到炮塔和炮身跟随对象运动。
「|Turret(联动物体):目标约束」由于关节是Y轴旋转的旋转关节,因此它与俯视图中的操作相关联。
由于「|Cannon」关节是Z轴旋转的旋转关节,因此它与前视图或右视图中的操作相关联。
TIPS 如果在连续模式后选择「偏移」,则无需重新选择工具即可继续操作。
- 从「显示」菜单中选择「动画编辑器」以显示「动画编辑器」窗口。
- 单击「运动」窗口中的「播放」按钮以预览运动。
可以确认炮塔和炮身的指向和步行运动同步。
●瞄准照相机
创建一个瞄准照相机的联动结构并确认操作。
当前在「照相机」窗口中选择的照相机将成为目标。
◆建立联系
- 从「文件」菜单中选择「新建场景」以创建新场景。
- 从「显示」菜单中选择「浏览器」以显示浏览器。
- 从工具箱的「部件」选项卡中选择「旋转」,然后在正视图中创建一个绕Y轴旋转的旋转关节。
- 回转关节在被选中状态下,单击工具箱的「生成」选项卡上的「普通」按钮,然后从显示的工具中选择「长方形」以创建闭合线形。
在浏览器中,确保您创建的闭合线形状包含在旋转关节中。

- 选择旋转关节。
- 从浏览器的「信息」弹出菜单中选择「目标约束照相机联动属性」。
显示「目标约束照相机联动设置」对话框中的。
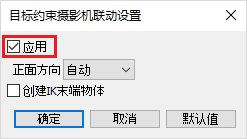
- 单击「目标约束照相机联动设置」对话框中的「应用」复选框,然后单击「确定」按钮。
浏览器中的「旋转」关节的显示变为「旋转(联动照相机):目标约束」。
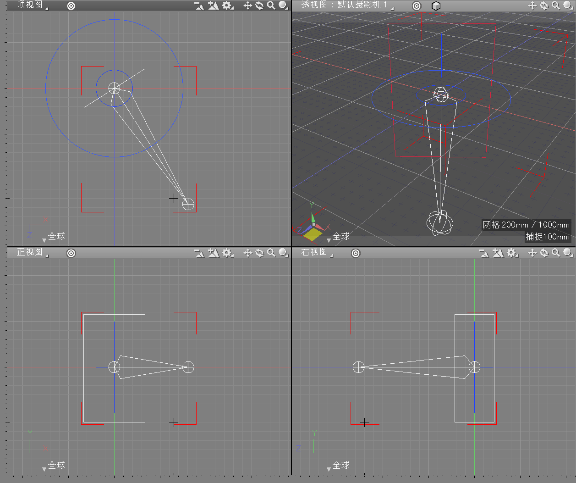
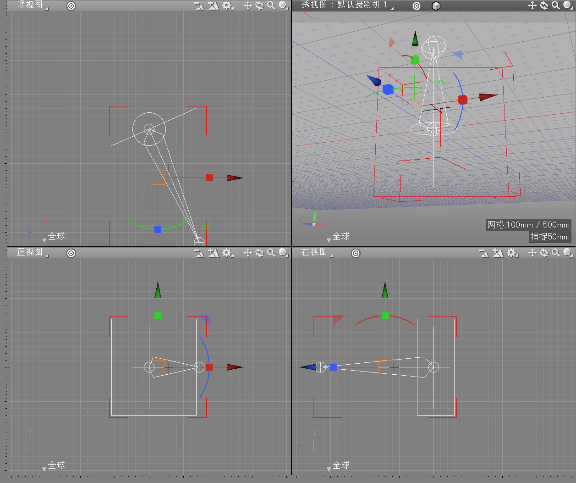
- 在「照相机」窗口或图形窗口上通过鼠标操作移动照相机。
闭合线形状会以面向照相机的方向旋转。
参照 有关照相机的操作,请参阅「Shade 3D手册」。
◆解除联动
从自定义信息中,您可以解除物体和照相机的联动。
- 从目前为止的操作场景中选择「旋转(联动照相机):目标约束」。
- 从浏览器的「信息」弹出菜单中选择「目标约束照相机联动属性」。
将会显示「目标约束照相机联动设置」对话框。 - 取消「目标约束照相机联动设置」对话框的「应用」复选,单击「确定」按钮。
解除物体和照相机之间的关联,浏览器显示变回「旋转」。